Télega electric propulsion
Télega is a high-end PMSM/BLDC motor control solution for aerospace applications and robotics. Telega employs advanced vector control algorithms (FOC) that provide high energy efficiency, robustness, and fast response. A wide variety of supported communication interfaces and auxiliary features enable easy integration into the end application.
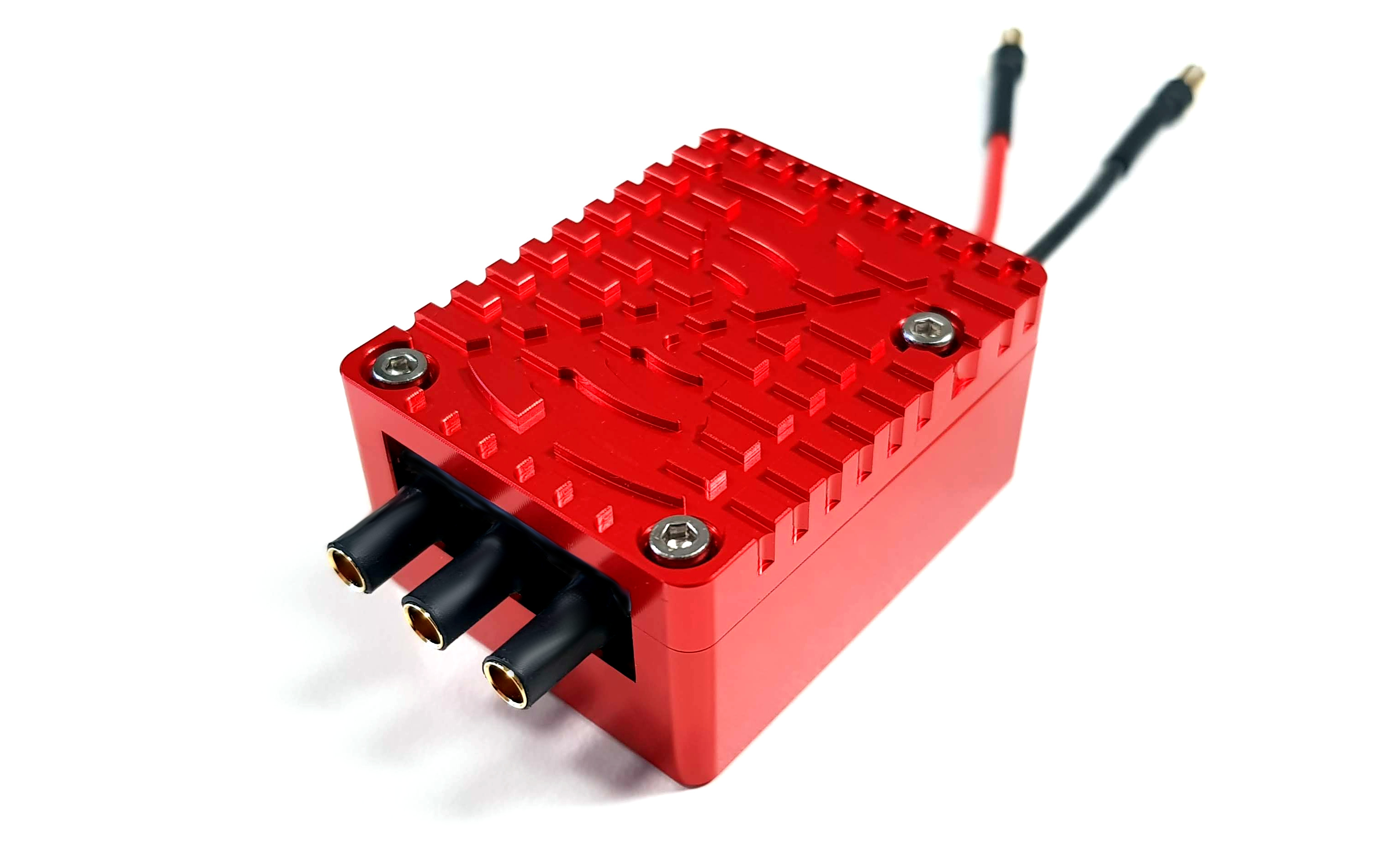
Myxa ESC
Myxa is a high-end sensorless FOC ESC based on the Télega technology. Myxa is designed for use in propulsion systems of light unmanned aircraft and watercraft.
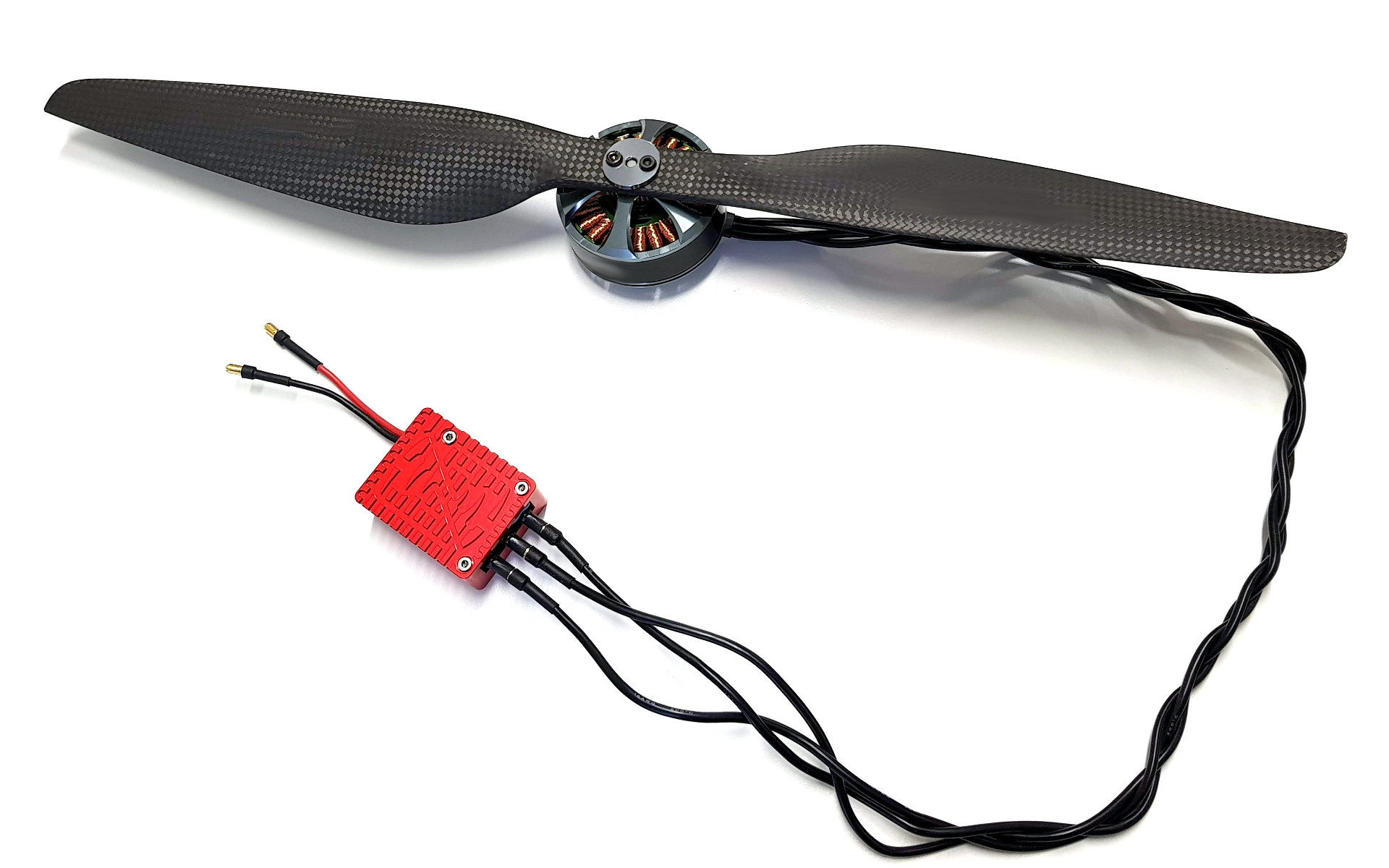
UAV propulsion kits
We assemble and supply tuned propulsion kits and integrated drives for UAV applications. This is a complete power train solution from ESC to propeller.
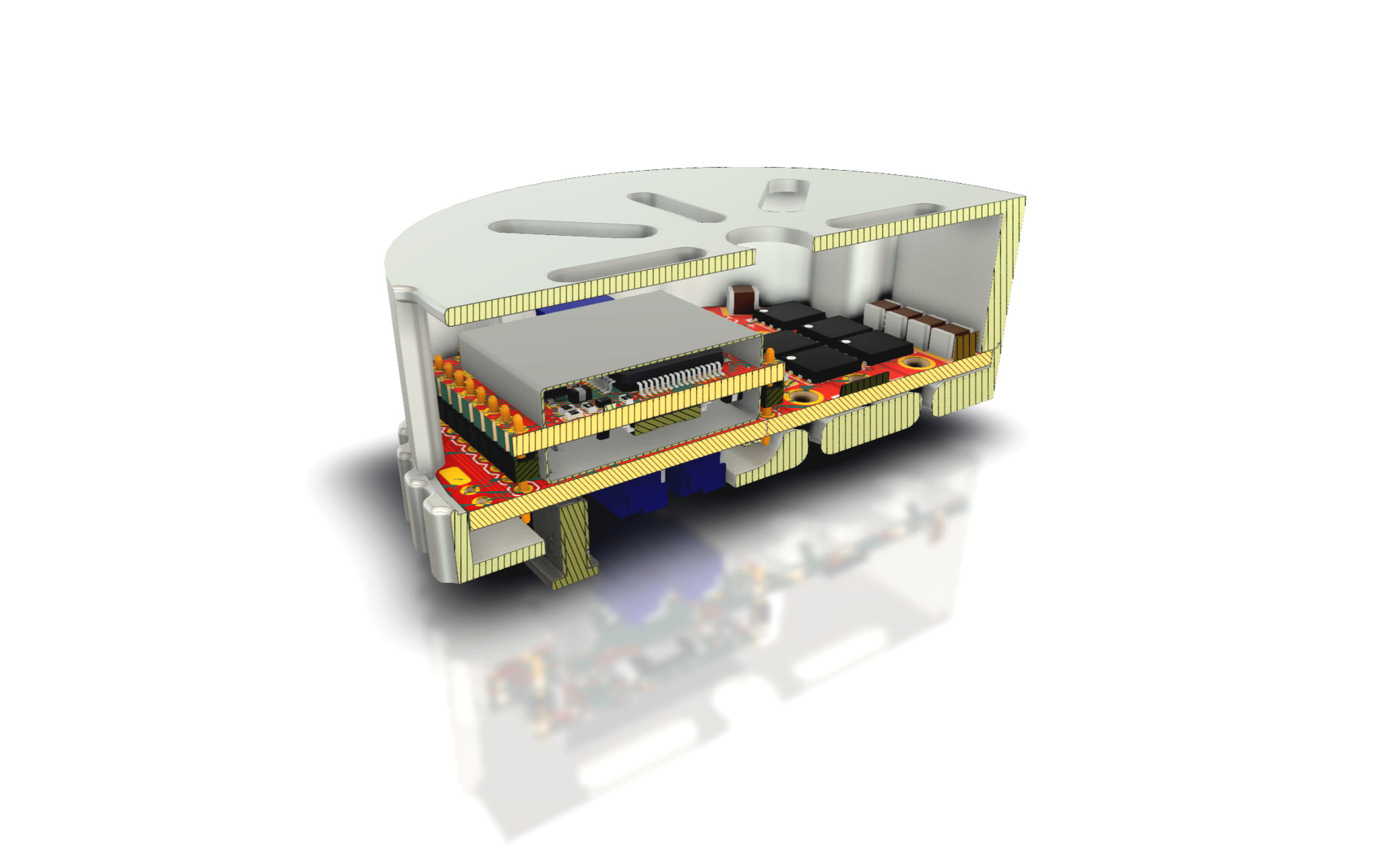
Customized solutions
We design and manufacture application-specific electric propulsion systems based on the Télega technology. Get in touch to discuss your application with us.
Zubax GNSS 2
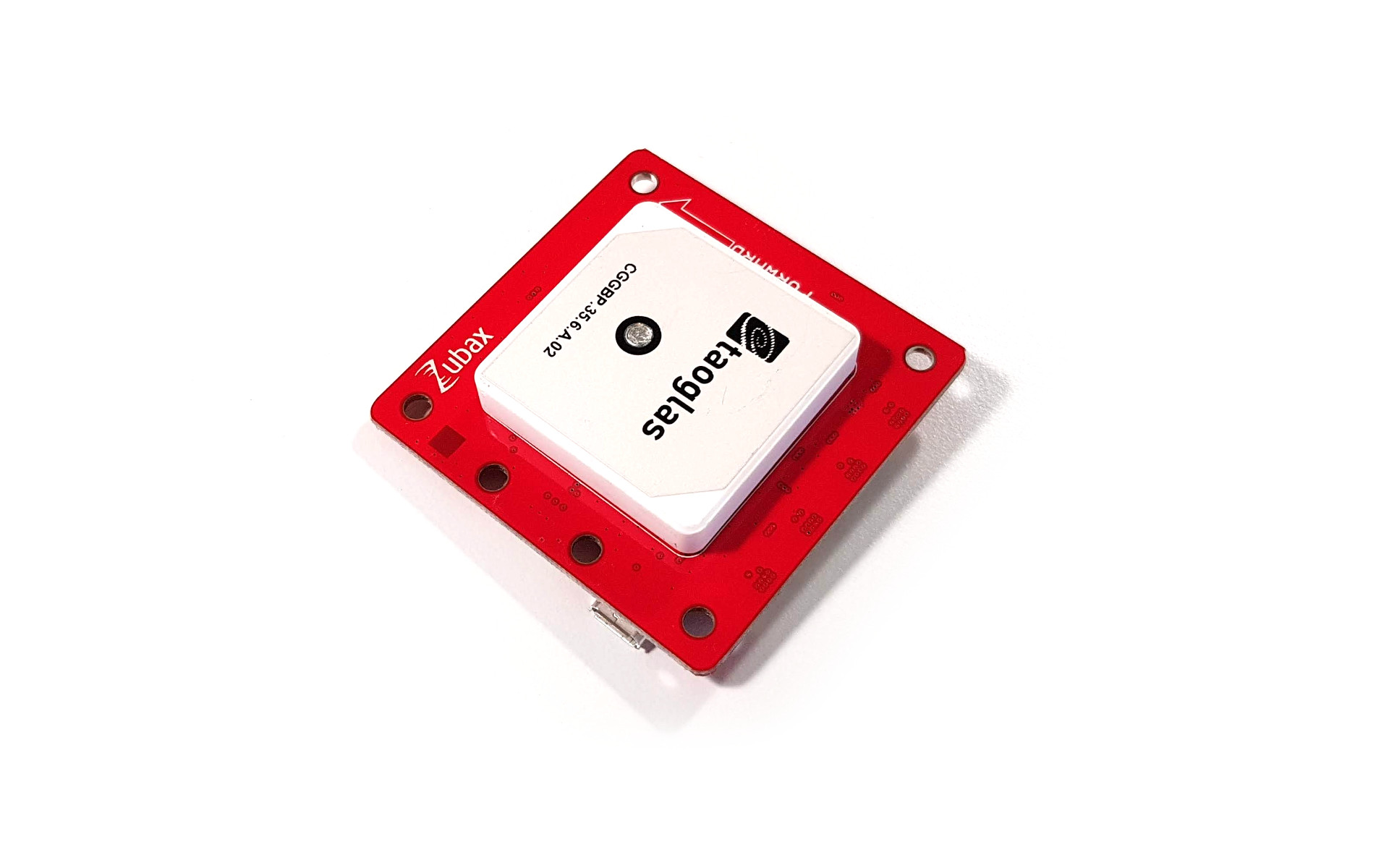
Zubax GNSS 2 is a compact GPS/GLONASS/GALILEO positioning module for robotic applications with an integrated compass and a barometric altimeter. Being widely deployed in the most demanding applications around the globe, it has a proven track record of top-notch performance and exceptional reliability.
GNSS 2 supports several major communication interfaces used in the industry which facilitate interoperability with all major vehicular control systems.
Extensive runtime self-diagnostics and detailed factory test reports that are available for every manufactured unit guarantee consistent performance for the entire lifetime of the module.
Cyphal intravehicular networking

Cyphal (formerly known as UAVCAN) is an open technology for real-time intravehicular distributed computing and communication based on modern networking standards (Ethernet, CAN FD, etc.). Zubax Robotics is the original developer and maintainer of this technology.
Cyphal is created specifically to address the needs of modern vehicles with sophisticated on-board intelligence. The protocol natively supports advanced features like complex data types, publish/subscribe & RPC, time synchronization, modular redundancy, and more.
Being an open standard, Cyphal is free to use for everyone, and it will always remain this way. High-quality open source implementations and development tools are available under permissive OSS licenses from the OpenCyphal project.
Our Clients
Lipovy Andrey (Chief Designer at Spaitech LLC)
"I want to express my gratitude to you for such a successful controller, it really allowed to increase the flight duration of one of our production vehicles by 25%."
Helge Hackbarth (Managing Director at KopterKraft OÜ)
"We could achieve 3.1 kg thrust with only about 200W - which means 16 g/W efficiency. It looks like your ESC is already a winner for us! Test video."
Ryan Johnston (CEO at Applied Aeronautics)
"We took a known problematic motor that would always get bogged down in rapid acceleration and skip and [Myxa] made it work. Quality is top notch [...], no corners cut on that."
Paul Berthold (Co-Founder & Powertrain Engineer at Vortex Aerotec)
"Its always a pleasure to work with Zubax. Your manuals, documentation and customer service are top notch!"
Recent blog posts

|
|
|
|
|
|

|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|