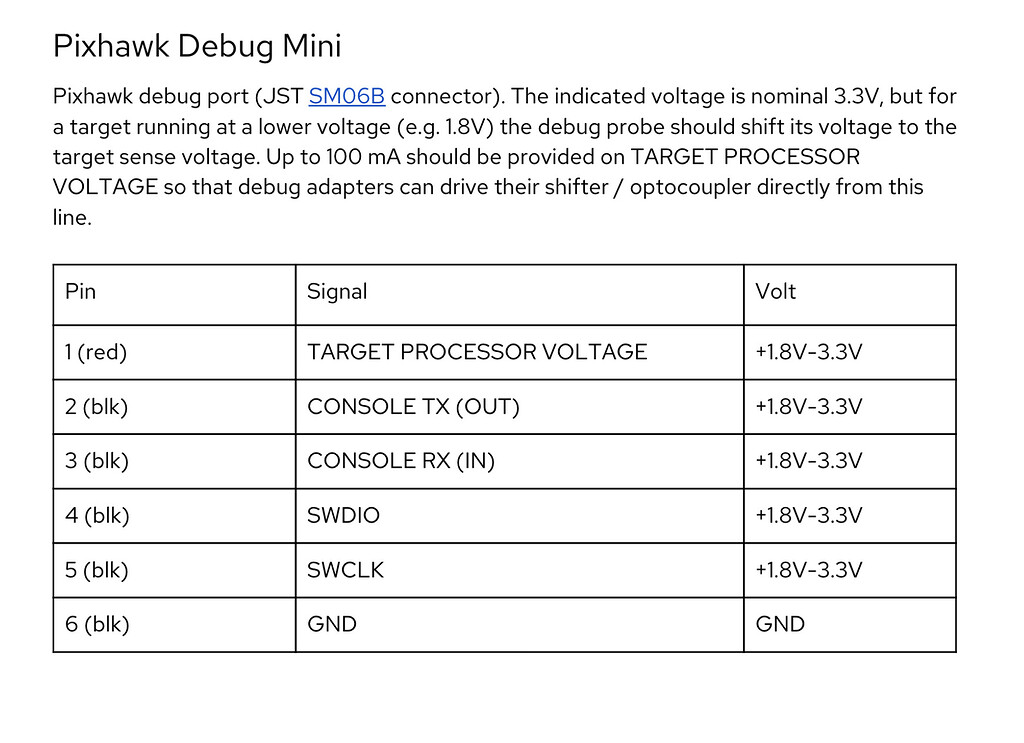
EPM
An electro-permanent magnet designed for aerospace and robotic applications.
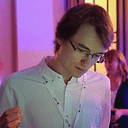
Zubax EPM is an electro-permanent magnet designed for aerospace and robotic applications. It combines the advantages of electro- and permanent magnets by being able to switch between the on-state and off-state on demand (like an electromagnet); while consuming zero power in either state (like a permanent magnet). The device supports a variety of communication interfaces that enable easy integration into any end system.
Zubax EPM follows high safety and reliability standards that ensure dependable operation in hostile environments.
Applications
- Payload attachment in aerial vehicles.
- Workholding in CNC machines, manipulators, and robots.
- Magnetic locks, clamps, and holders.
Features
- Strong magnet in a very compact and lightweight form-factor.
- Zero power consumption in either on or off state.
- Fast on↔off state transition in approx. 1 second.
- Low (de-)magnetization energy consumption.
- Entirely solid-state construction, no moving parts inside.
- IP68 rated — dust-tight, submersible.
- AEC-Q grade 2 electronics.
- Resistant to vibration, mechanical stress, high and low temperatures, electromagnetic interference, humidity, dust, and some aggressive chemicals.
- Wide power supply voltage range ensures trivial integration into the end system.
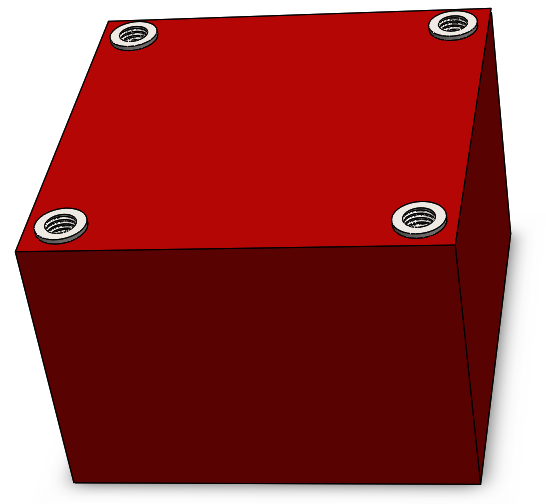
- Compatible with industry-standard interfaces:
- Cyphal/CAN FD control with diagnostic telemetry;
- RCPWM control input;
- voltage level control input.
Variants
Three types of EPM are available:
- EPM401M - optimized for cost-sensitive applications.
- EPM401MA - nearly a drop-in replacement for OpenGrab EPM v3
- EPM402M - optimized for mission-critical applications due to doubly-redundant CAN FD interface.
| Variant | Mass, g | Dimensions, mm | Cyphal/CAN iface | Analog iface |
|---|---|---|---|---|
| EPM401M | 70 | 40✕40✕30 | Single UCANPHY Micro | No |
| EPM401MA | 70 | 40✕40✕30 | Single UCANPHY Micro | Yes |
| EPM402M | 70 | 40✕40✕30 | Double UCANPHY Micro | No |
For low-volume orders, please proceed to the online store. For large orders and long-term supply options, please get in touch.